最小二乘法拟合直线
上周面试了一家做机器人的公司,他们发我一道题目,顺便记录学习下。
问题
给定一组2D平面上的离散点: 请求解出对应拟合直线
要求有几点:
1、建立该问题的数学模型,并且基于C++予以实现,包括:类/接口定义,以及实现细节
2、建议选择如下两种方法之一,或者酌情选择其他的方法:
- 基于ceres优化库,建立优化问题,并求解
- 基于Eigen工具库求解(提示:通过特征向量分解的方式)
3、生成测试数据集,并对比验证不同实现的拟合效果
4、输出一份报告,包括:问题的定义,求解细节,以及验证结果等

分析
其实就是直线拟合,这里就想到了最小二乘(视觉SLAM十四讲有写)。
最小二乘法,又称最小平方法。它通过最小化误差的平方和寻找数据的最佳函数匹配。主要作用是从一堆相关数据中求解数据的一般性规律。在图像处理方面多用于各种形状的拟合。
最小二乘拟合直线,主要体现为找到一条直线,使得所有已知的点到这条直线的欧式距离的和最小(或者理解为点到直线的误差平方和最小)。
那我是思考了两种方法,一种是直接求解最小二乘,一种是使用Ceres库优化迭代最小二乘。
解决
数学模型的建立
目标
- 对于等精度测量所得的N组数据,。其中值被认为是准确的,所有误差只与有关。需要把这组观测数据拟合成一条直线,并求对应法向量。
约束
变量
- 对于一条直线,有两个待定参数,代表截距,代表斜率(代码里取)。
法一:直接求解
采用直线斜截式,通过最小二乘拟合方程系数
根据最小二乘原理,误差平方和最小,得误差函数:
高数中极值定理可知,误差方程一阶导数等于处取得极值,因此分别对其关于和求导,解,值使得误差函数取最小值。
但是直线斜截式无法表示垂直x轴的直线,如:。
令,得
上面过程繁琐,只适用于直线的最小二乘解。下面将直线斜截式拓展导任意曲线,任意曲线方程
。可以看到直线斜截式即,时的曲线方程。将曲线方程,写成矩阵乘积的形式:
上面乘积形式,即,解出的 就是最小二乘解。
代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
| void LeastSquares(std::vector<double> &data_x, std::vector<double> &data_y,
int data_n) {
double A, B, C, D, E, F = 0.0;
double x_square_sum, x_sum, y_sum, xy_multi_sum = 0.0;
for (int i = 0; i < data_n; i++) {
x_square_sum += data_x[i] * data_x[i];
x_sum += data_x[i];
xy_multi_sum += data_x[i] * data_y[i];
y_sum += data_y[i];
}
double k, b, temp = 0;
if (temp = (data_n * x_square_sum - x_sum * x_sum)) {
k = (data_n * xy_multi_sum - x_sum * y_sum) / temp;
b = (x_square_sum * y_sum - x_sum * xy_multi_sum) / temp;
} else {
k = 1;
b = 0;
}
double Xmean, Ymean;
Xmean = x_sum / data_n;
Ymean = y_sum / data_n;
double tempSumXX = 0.0, tempSumYY = 0.0;
for (int i = 0; i < data_n; i++) {
tempSumXX += (data_x[i] - Xmean) * (data_x[i] - Xmean);
tempSumYY += (data_y[i] - Ymean) * (data_y[i] - Ymean);
E += (data_x[i] - Xmean) * (data_y[i] - Ymean);
}
F = sqrt(tempSumXX) * sqrt(tempSumYY);
double r;
r = E / F;
std::cout << "k: " << k << "\n"
<< "b: " << b << "\n"
<< "r: " << r << std::endl;
std::cout << "Direction Vector (B,-A): (" << -1 << "," << -k << ")\n";
std::cout << "Normal Vector (A,B): (" << k << "," << -1 << ")\n";
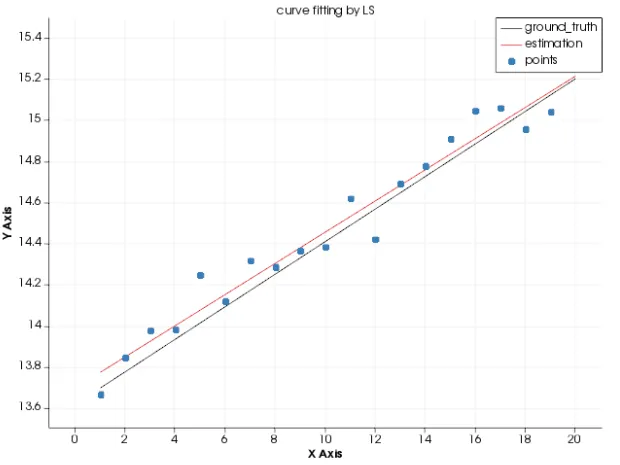
const char *title = "curve fitting by LS";
Plot(data_x, data_y, k, b, title);
}
|
法二:Ceres优化
首先是定义残差快
1
2
3
4
5
6
7
8
9
10
11
12
13
| struct ExponentialResidual {
ExponentialResidual(double x, double y) : x_(x), y_(y) {}
template <typename T>
bool operator()(const T *const k, const T *const b, T *residual) const {
residual[0] = y_ - (k[0] * x_ + b[0]);
return true;
}
private:
const double x_;
const double y_;
};
|
然后构建最小二乘问题
1
2
3
4
5
6
| for (int i = 0; i < data_x.size(); ++i) {
problem.AddResidualBlock(
new ceres::AutoDiffCostFunction<ExponentialResidual, 1, 1, 1>(
new ExponentialResidual(data_x[i], data_y[i])),
NULL, &k, &b);
}
|
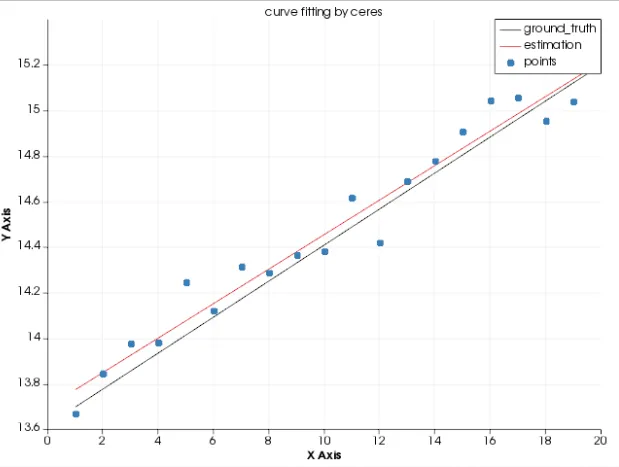
最后优化求解
1
2
3
4
5
6
| ceres::Solver::Options options;
options.max_num_iterations = 20;
options.linear_solver_type = ceres::DENSE_QR;
options.minimizer_progress_to_stdout = true;
ceres::Solver::Summary summary;
ceres::Solve(options, &problem, &summary);
|
结果
代码仓库
Least_Square_Fitting_Line
参考
1、最小二乘法求解直线方程系数
2、ceres拟合直线